

CSWR's Doppler on Wheels (DOW) network consists of three mobile Doppler radar trucks, DOW 6, DOW 7 and Rapid-Scan DOW (DOW8).




The DOW radar facility has served the NSF community as part of the Lower Atmospheric Observing Facilities (LAOF) program since 2008. Prior to then, the DOWs operated as a de facto NSF community resource, participating in many scientific and educational field programs not led by the DOW PI. The DOWs have been among the most widely used facilities, participating in over 30 field campaigns since VORTEX1. DOWs have been requested for several field programs (e.g., PECAN (2015), OLYMPEX (2015), SNOWIE (2017) and RELAMPAGO (2018)). The DOWs are the most frequently requested and allocated LAOF facility for education and outreach. They have deployed at 18 universities and participated in extensive nationwide outreach tours impacting over 100,000 students.
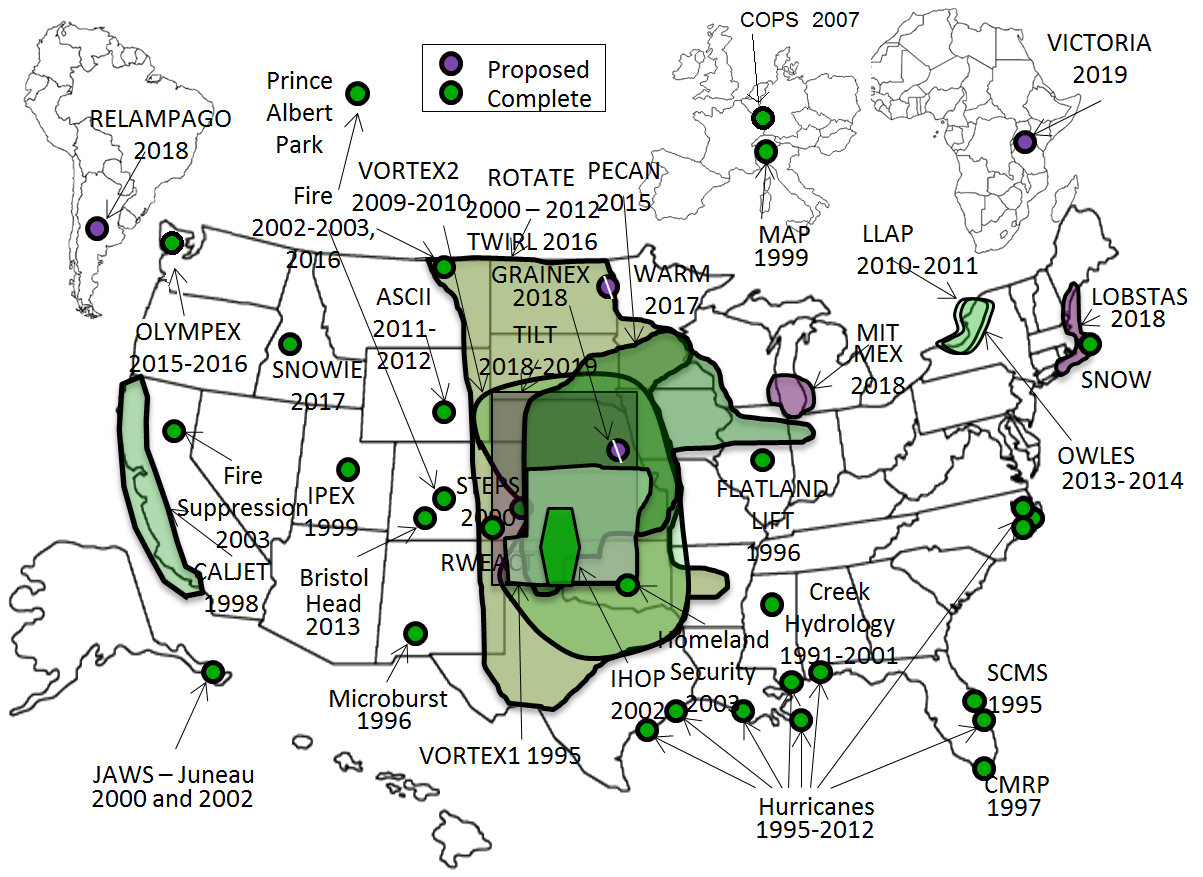
Projects utilizing the DOW radar facility
The DOW facility consists of three mobile radars (DOW6, DOW7 and the Rapid-Scan DOW (DOW8), four support vehicles outfitted as mobile mesonets, a mobile office and maintenance/repair van and an array of quickly-deployable weather stations (Pods) that can be carried at low cost in the support vehicles/mesonets (see image, below.)

Many important meteorological phenomena (such as tornadoes, hurricanes, microbursts, dust devils, etc.) occur infrequently and/or very near the ground. These are difficult to measure with traditional stationary meteorological radars, due to temporal and/or spatial limitations. Additionally, many interesting physical processes occur at sub-kilometer scales, but the ranges between the phenomena of interest and the stationary radars are almost always quite large. This results in finescale (sub-kilometer) structures being unresolvable due to beam spreading between stationary radars and the targets. Near-ground (<300 m AGL) structures are often undetectable due to the masking of the transmitted beam by topography and obstructions, vertical beam spreading, and earth curvature. Finally, these phenomena frequently occur on timescales of seconds to minutes and thus are sampled poorly by typical surveillance radar scanning strategies. Thus, there was a need for finescale observations of these phenomena in order to better understand the mechanisms involved in their formation and maintenance.
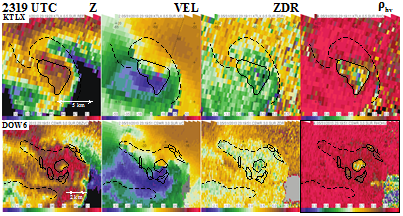
Inter-comparison of dual-polarization products between the S-Band WSR-88D (top) and the X-Band DOW6 (bottom) radars during the 31 May 2013 El Reno tornadic supercell at ~2319 UTC. Even though observing geometry and wavelength are different, excellent agreement exists between the DOW and 88D, but much finer-scale detail is evident in the DOW6 data. Solid (stippled) black lines are ρhv (ZDR) signatures. (Wurman et al. 2013)
Reliable, high-quality, accurate and carefully navigated DOW data have been at the core of analyses of winter storms, convective initiation, hydrology, severe wind/damage relationships, orographic precipitation, hurricane boundary layer structure, tornado genesis and structure and other analyses. The DOW radars made the first 3D maps of tornado winds and debris, the first maps of multiple vortex structure in tornadoes, the first maps of anticyclonic tornadoes; discovered hurricane boundary layer rolls, made the first observations of secondary rear flank downdrafts, mapped mesocyclone circulations in lake effect snowbands, observed how misocyclones along boundaries affected convective initiation, obtained the only comparisons of radar-measured winds, in-situ winds, and damage in tornadoes.
The DOW Facility provides the only:
• Three-radar, fast-scan, narrow-beam, multiple-Doppler network
• Narrow-beam, (0.8-0.9 degree) rapid-scan capability
• Dual-frequency dual-polarization capability for simultaneous LDR, ZDR, Phi-DP, Rho-HV
• Dual-frequency dual-polarization for 2x faster ZDR, Rho-HV, Phi-DP
• Truly mobile (while actually moving) multiple-Doppler capability
• Integrated Radar, Mobile Mesonet, Deployable Pod capability
• Bistatic-network-ready mobile radars.
DOW6 and DOW7 have the maximum transmit power of any mobile X-band weather radar, employing dual 250 kW transmitters, for maximum sensitivity at the greatest range. High gain antennas with 0.9-degree beam widths provide maximum practical sensitivity and minimum beam width. Quick scanning capability, now at 50 degrees/second with future improvements planned, allows for 7s 360-sweeps and 4-5 s sectors.
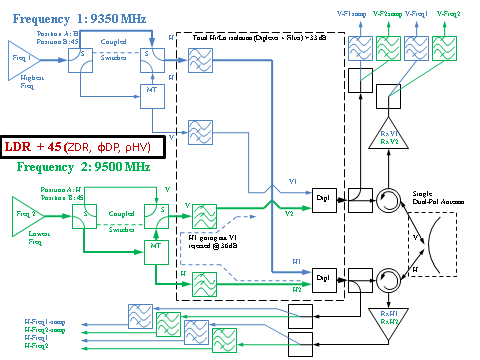
DOW6 and DOW7 employ a unique dual-frequency, dual-polarization design capable of executing two unique data collection modes: fast-45, and LDR+45. In fast-45 mode, both transmitters, separated by 150 MHz, transmit at 45-degree polarization and H and V are received separately. High quality dual-polarization data can be collected at much faster speed since the samples returned from each transmitted frequency are fully independent. Fast dual-polarization scanning permits the rapid evolution of mesoscale cloud/precipitation microphysical structures to be studied. In LDR+45 mode, one transmit frequency is transmitted at H polarization only, with the other frequency at 45 degrees, and H and V are received. LDR is measured at the one frequency, while the 45-degree products of ZDR, Rho-HV, and Phi-DP can be measured using the 2nd frequency. The LDR frequency also provides Z,V, etc. DOWs employ PENTEK signal processing cards and an NCAR-developed signal processing software suite, which is compatible with NCAR-managed LAOF radars (Dixon et al. 2013). The TITAN and Hawkeye suite are used to calculate moments (e.g. V, ZDR), and for archiving (redundant on internal RAID and external USB3 for easy transfer for quick look), display, and real-time remote transfer.
| Transmitters | 2x 250 kW magnetron |
|---|---|
| PRF | 500-6000 Hz |
| Pulse length | 0.15-1.0 us |
| Scan rate | 50 deg/sec |
| Products | LDR, ZDR, Rho-HV, V, Z, SW, NCP, etc. (Combined or separate by frequency, Raw IQ for max post-proc flexibility |
| Beam Width | 0.9 deg |
| Gate length | 15-600 m |
Rapid evolution and small scales are tightly linked, and since data from the DOWs suggested that observations of phenomena associated with tornadogenesis, microbursts and hurricane boundary layer wind streaks are poorly resolved by conventional scanning radars and even conventional mobile radars (due to spatial and temporal limitations, respectively), rapid-scan and mobility go hand in hand. The multi-beam Rapid-Scan DOW achieves the finest beam width of any rapidly scanning mobile radar, 0.8-0.9 deg, balancing fine temporal scale and spatial scale observations better than any other system.
Seven-second volumes and < 1 degree beam width optimize temporal/spatial resolution. At a range of ~10 km, the Rapid-Scan’s ~150 m beam width and 7-second volumetric update rate are well matched to a typical advective time scale; (150 m) / (20 m/s) = 15 s. Fast scanning radars with broader beams (e.g. RAXPOL) or other stationary ones (e.g. NPA) cannot match RSDOW combined fine-scale spatial+temporal capabilities. Even in the most extreme documented case of rapid movement/evolution of tornado sub-vortices translating at nearly 80 m/s, the RSDOW was capable of non-spatially-aliased observations (Wurman et al. 2013 El Reno). In nearly any application (e.g. boundary layer thermals, hurricane boundary layer rolls, tornadogenesis) 7-second updates provide more than sufficient temporal resolution.
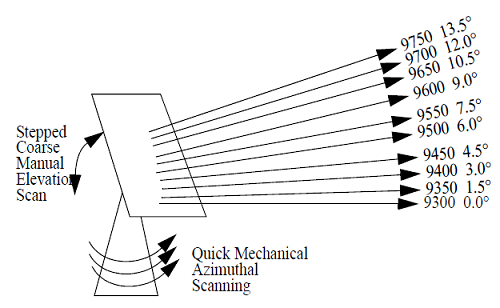
Although historically, phased array rapid-scan technologies have been prohibitively expensive, in 2001, CSWR began developing an experimental rapid-DOW, capable of scanning with a multiple beam system to collect partial volumetric data in approximately 10 seconds. Operating, the rapid-DOW incorporates a slotted waveguide array antenna, designed to produce frequency dependent beam steering. Energy from a single transmitter produces six pencil-beams, each with a distinct frequency and elevation angle, nearly simultaneously (see Figure 3 below.) The rapid mechanical azimuthal scanning results in a six-beam sweep of the sky in six seconds.
| Transmitters | TWT 40 kW |
|---|---|
| PRF | 500-10,000 Hz |
| Pulse length | 0.1 = 2.0 us (pulse comp possible) |
| Number of beams | 6 (upgradeable to 12 or more) |
| Scan rate | 50 deg/sec (7-sec volumes) |
| Products | Z, V, NCP, SW, P |
| Beam Width | 0.8-0.9 deg |
| Gate length | 25-600 m |
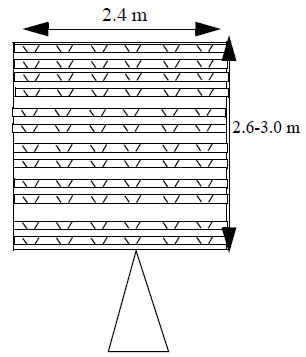
The antenna array, approximately 2.4 m on a side, consists of individual slotted waveguide elements (see figure below.) At any given frequency, the array produces a 0.9°-1.0° beam. All returned signals pass through single rotarysjoints, circulator, and amplifier and initial IF downconversion, before being split and sent to individual frequency modules (channels).
Steering is approximately .03° (MHz)-1, producing approximately 15° steering across the X-band spectrum (9.3-9.8 GHz). Pulse lengths as short as 125 ns result in negligible dispersion (8MHz effective bandwidth results in just .24°dispersion) within individual beams. Minimum frequency separations can be adjusted depending on pulselengths in order to provide channel isolation.
Returned energy from all of the beam is received simultaneously, then split and processed by individual frequency modules, and the frequency of each individual beam is independently controlled by individual synthesizers in each frequency module. By changing the frequencies of the transmitted energy, the elevation angle offsets of the individual beams can be modified, allowing elevation angle offset sets to be tailored for boundary layer or deep convective studies.
The elevation angle of any beam can be changed on a integration time-by-integration time basis, permitting saw-toothed or dithered scans. This permits a better matching of horizontal and vertical observation scales.
The ‘truck’ component of a mobile radar facility is perhaps mundane, but is critical to its success, reliability, and versatility. The platforms of the three DOWs are similar to each other. The differences among them are minor and will only be mentioned briefly here. The DOWs are housed on 7500 series International Workstar Trucks. The 7500 series is much more powerful and rugged than the earlier 4300/4700 series used to house some other mobile radars (e.g. NOXP and SRs, MAX). The ability to maintain highway speed ~75 mph, even in strong headwinds and up hills, and high torque for quick acceleration (saving several minutes ferrying per mission during chases), enables the DOWs to achieve shorter re-deployment times in mobile experiments such as OWLES, PECAN, REFLEX, and VORTEX2. This was evident during VORTEX2 when DOWs were nearly always “first on the scene” to begin data collection earlier. Simply put, the first-on-scene arrival of DOWs expanded the quality of VORTEX2 science, allowing tornadogenesis to be studied in Goshen, Wyoming (Markowski et al 2012ab, Kosiba et al. 2013, Marquis et al. 2013, Wakimoto et al 2012ab, Atkins et al 2012). Additionally, the DOWs each carry over 200 gallons (800 liters) of fuel, for >1000 mile range, so no time-consuming refueling is necessary during any mission day.
![]()